
BACKGROUND
Our client is an independent system integrator dedicated to helping customers increase their productivity. They offer solutions for industrial automation, from simulation to installation. The company originated from England. The total revenue for the year 2020 has been $178 Million.
CLIENT’S PROBLEMS
1. Manual palletization/depalletization cartons are very time-consuming. For each load/unload carton, it takes more than 15 seconds.
2. Large manpower is required in the process of unloading which leads to a high cost of labor and training.
PROBLEM IMPLICATIONS
1. Misplacing of cartons and damaging items inside them were observed during manual pick and place. The percentage of misplacing is 5 percent whereas the damaged items percentage is 14 percent.
2. The percentage of ergonomic injuries is 1-2 percent.
CLIENT REQUIREMENTS
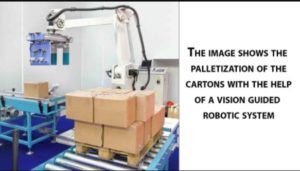
To automate the process of loading/unloading cartons (with varying payloads of 10-15 kgs) with the help of a vision-guided robotic system. A machine vision is required to determine the coordinates of the cartons for pick and place. A vision system is required to enhance the flexibility and efficiency of a traditional robotic system. This approach helps manufacturers to increase the throughput.
CURRENT PROCESS
Both palletizing and depalletizing is being carried out manually. Because of limited human efficiency, load/unload operations are inconsistent and take a longer duration. Four operators are deployed to perform palletizing and depalletizing jobs.

BUSINESS IMPACT
1. The required volume of items is not shipped to the customer at the stipulated time leading to a shortage in supply.
2. Manual operations cause errors: misplacing, and damaging products. This leads to increased factory overheads.
3. Massive manpower and appropriate training are required for load/unload jobs that increase the cost of operation.
SOLUTION USING MACHINE VISION
A robotic mechanism with an integrated machine vision system is installed to detect the position of the cartons to load/unload. In this case, a 5-megapixel camera (30 frames per second) is mounted on the top of the robotic arm to capture the image of boxes. A standard resolution lens is used for clear image acquisition. The camera is connected with a computational device to process the image in order to determine the coordinates of the boxes. Once the coordinates are identified the computational device sends the signal to the robotic system for pick & place.
SETUP
IMAGES
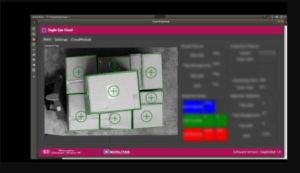
DETECTING BOXES IN QEP(QUALITAS EAGLE-EYE® PLATFORM) A VGR system detecting cartons for depalletization
CONCLUSION
Followings are the potential benefits of a machine vision system deployed on a robot cell –
1. Cycle time of pick and place can be reduced to 3 seconds, which will increase the rate of production.
2. Complete elimination of manpower is possible, which will reduce the cost of labor and training. This can completely reduce ergonomic injuries.
Get In Touch With Us






