Machine vision systems include the whole infrastructure, both the tangible hardware and the intangible software, that are involved in the identification of defects and removal of the defective objects from the production line.
Introduction to Machine Vision
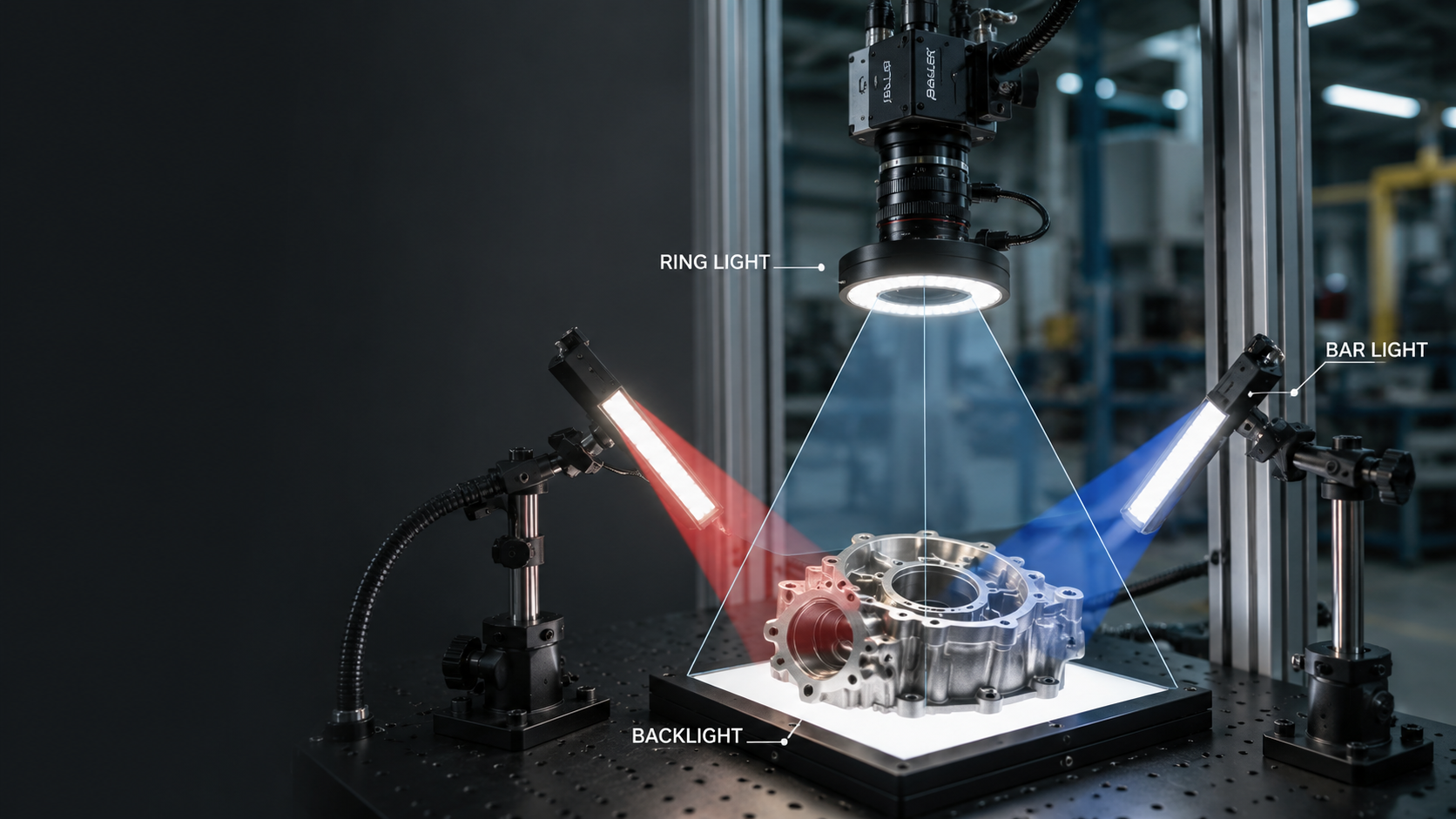
Wikipedia defines machine vision as the technology and methods used to provide image-based automatic inspection and analysis for applications such as process control, automated inspection, and robot guidance, usually in the industrial landscape. A basic machine vision system consists of a digital or analogous camera, embedded systems composed of processors and software, a frame grabber, and lighting systems.
Related Article– The Evolution of Machine Vision
How machine vision systems work can be a little difficult to grasp. Therefore, let’s consider the example of the pharmaceutical industry. Say you have to ensure that all the labels are straight and the bottles defect-free. Now, a machine vision system can automate the entire inspection process and accomplish the same tasks much faster and accurately. Let’s now understand the various parts that make up a machine vision system.
Parts of a Machine Vision System
Machine vision systems include the whole infrastructure, both the tangible hardware and the intangible software, that are involved in the identification of defects and removal of the defective objects from the production line. The four constituents of the machine vision process flow have been enumerated below:
- Pre-process automation
- Image acquisition
- Image processing
- Post-process automation
Also, Read 3 Uncommon Applications of Machine Vision
In this post, we will majorly discuss the pre-process automation step and discuss a few related use-cases for better comprehension.
Pre-process Automation
In this foremost step, the vision system configures itself for the image acquisition process. A machine vision system might witness various kinds of objects throughout the day. These objects could vary in size, shape, orientation, etc. The system might have to vary its working distance or zoom if needed.
Let’s say you have to inspect fasteners that are being presented in huge bunches and no particular orientation. You’ve tens of manual laborers checking dimensions and other related quality parameters. Suppose you now want to switch to an MV system.
Now, we need to ensure that each fastener complies with the pre-determined quality standards. And a machine vision system needs a dedicated, 360-degree inspection to meet such expectations. So, can we implement a vision system right away? Not. First of all, we need a mechanism or system in place that presents the fastener individually and in the right orientation in front of the image acquisition system. Only then can the MV system operate efficiently and deliver optimal results. The requisite mechanism is known as pre-processing automation. In this scenario, by using a vibratory bowl mechanism you get fasteners in the right orientation, and then a system could rotate each piece for precise 360-degree image acquisition.
Succinctly, pre-process automation is the physical material or camera automation that is required for image acquisition. A few examples of the same are the following:
- Use of conveyor belts
- Pick and Place systems
- Manual: For example, placing each screw to be inspected in the right alignment manually.
- Robotic camera movement
Use-Cases
- The thickness of Extruded Beadings
In this use case that involves the dimensional measurement of extruded beadings, having a conveyor in place suffices. This is because there is no necessity to inspect the underside and the thickness can be measured via only a line scan camera mounted at the top. The infrastructure in place is conducive for material movement and continuous scanning is being done for measuring the thickness of these different extruded surfaces. In this scenario, this existing conveyor might be a viable pre-processing solution.
- OCR Reading
In this use case that requires the reading of an OCR number, no conveyor is necessary. It is a relatively simple application because a single camera suffices and no complex movement is required for scanning an OCR. Here, a robot picks up the object from the bin and presents it in front of the camera in the proper alignment instead of the material handling being done manually. The robotic arm in this case is the pre-process automation involved.
Related Article– Optical Character Reading using AI
- Inspection of Cigarettes
For the inspection of cylindrical objects such as cigarettes, a rotatory turntable is leveraged. This rotatory turntable is used for detecting tiny scratches or other physical deformations. So, as the turntable rotates the object, a line scan camera continuously captures its high-resolution images and the vision system then inspects these digital images. To the uninitiated, a line scan camera is a kind of high-resolution camera that captures one row of pixels at a time and then stitches all those rows to form a clear 2D matrix of pixels. The pre-processing automation in this scenario involves synced turning of the cylindrical object.
- Inspection of Cars
This particular use-case demanded the inspection of car paint. The pre-process automation in this scenario included an overhead conveyor that displaced the car horizontally while cameras placed at the bottom and either side inspected the car paint.
- Inspection of Refrigerator’s Internal Sections
The objective of pre-processing automation in this use case was to present refrigerators in front of the vision system for inspection with the doors opened. Initially, the doors were opened manually and later replaced by a pneumatic system. A linear conveyor was used to move the refrigerators past the area scan cameras.
Conclusion
In this blog post, we discussed the basics of machine vision and understood the various steps in the machine vision process flow. We then delved deeper into pre-processing automation and discussed the pre-process automation involved in several use-cases.
Register For Our Upcoming Free Webinar
REGISTER NOW